帖子
由 BG6RSH »
对于机器人位置与姿态的视觉引导,大多数品牌的机器人都是基于工件坐标系实现的,ABB机器人也不例外,因此这里也需要添加一个工件坐标系。
“基本”菜单栏下,“其他”命令按钮的下拉菜单中,点击“创建工件坐标”,在弹出的创建工件坐标中,用户坐标框架下使用“取点创建框架”中的“三点”法,在工作台面中心点位置处,创建一个工件坐标系,坐标轴方向与大地坐标系保持一致。
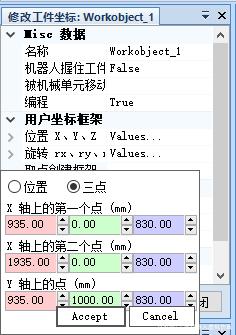
- 1.jpeg (25.07 KiB) 查看 1561 次
工件坐标系创建完成后,使用“同步”功能将在仿真环境中创建的工件坐标系以及工具坐标系同步到机器人控制器中,同步时二者所属的模块均选择“Module1”。
